
MAE 6245 · Graduate Course
Robotics Systems
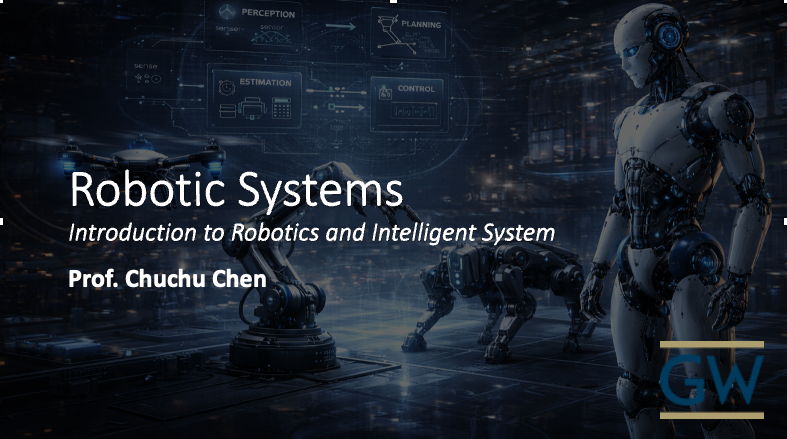
A systems-level introduction to robotics, focusing on how robots
sense, reason, and act under uncertainty.
Topics span dynamics and control, sensing and vision, estimation, planning, and learning in integrated robotic systems.
Topics span dynamics and control, sensing and vision, estimation, planning, and learning in integrated robotic systems.
Robotics systems often fail in the real world not because of “one bad module,” but because small modeling,
sensing, and decision errors compound through the pipeline.
This course treats robotics as an integrated system and emphasizes
assumptions, uncertainty, and system-level evaluation.
The class is research-oriented: critical reading, student-led paper discussions, and a semester-long open-ended project.
Project Tracks
Manipulation
- learning policies from demonstrations / datasets
- generalization across objects, scenes, and tasks
- benchmarking and reproducible evaluation
- sim-to-real transfer and real-robot testing
Navigation
- offline / interactive navigation learning
- robustness and generalization to new environments
- comparisons with classical planning baselines
- evaluation in simulation and (when possible) real settings
Students are welcome to propose related topics with instructor approval.
Resources
Simulators
Gazebo — ROS-integrated sim-to-real workflow PyBullet — lightweight Python-first simulator NVIDIA Isaac Lab — robot learning framework
Fall 2025 · MAE 4182
Electromechanical Control System Design
Modeling and feedback design for real electromechanical systems, emphasizing stability,
performance, and robustness in time and frequency domains.
Students learn classical control (PID, root locus, Bode) and use Python to simulate, analyze, and validate controller behavior in practice.
Students learn classical control (PID, root locus, Bode) and use Python to simulate, analyze, and validate controller behavior in practice.
Modeling
Stability
Robustness
Python